Uge 8: Riemann-Integraler i flere dimensioner og variabelskift#
Demo af Christian Mikkelstrup, Hans Henrik Hermansen, Jakob Lemvig, Karl Johan Måstrup Kristensen og Magnus Troen
from sympy import *
from dtumathtools import *
init_printing()
Python funktioner til parametriseringer#
Når vi arbejder med variableskift kan vi med fordel anvende at Python- og lambda-funktioner kan håndtere SymPy-objekter. For at illustrere hvordan dette kan anvendes ser vi på eksemplet
Vi vil gerne bestemme \(f(\boldsymbol{r}(u,v,w))\).
Til dette definere vi nu \(f\) som hhv. en SymPy-expression (variabel), en standard python-funktion og en lambda-funktion
x,y,z = symbols('x,y,z', real =True)
u,v,w = symbols('u,v,w', real =True)
# Parameterfunktion
r = Matrix([u -v, w**2, v*(u+w)])
# Funktioner
f_sym = x+y+z
def f_function(x,y,z):
return x+y+z
f_lam = lambda x,y,z : x+y+z
Som SymPy-expression kan \(f(\boldsymbol{r}(u,v,w))\) opnås ved
fr_sym = f_sym.subs(zip((x,y,z), r)).simplify()
Med Python- og lambda-funktionen kan vi i stedet slippe afsted med
fr_function = f_function(*r).simplify()
fr_lam = f_lam(*r).simplify()
Det er dog vigtigt at man husker *! Dette fortæller python at koordinaterne i \(\boldsymbol{r}\) skal gives til funktionen som individuelle argumenter
fr_sym, fr_function, fr_lam

Integration af områder begrænset af rette linjer#
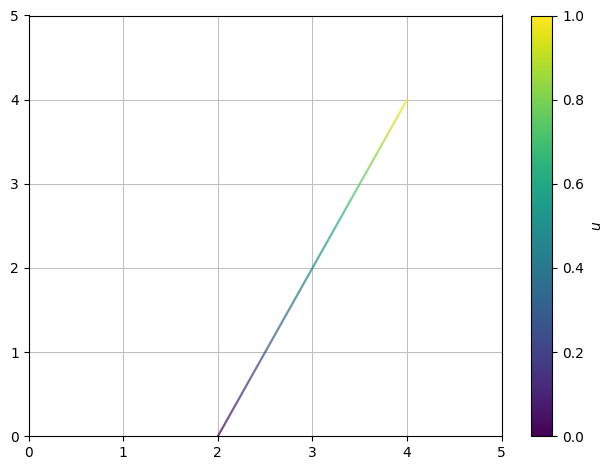
Den simpleste parameterkurve er en ret linje. Et eksempel på dette er linjen mellem punkterne \((2,0)\) og \((4,4)\):
Parametriseret ved
hvor \(u \in [0,1]\). Når parameteren \(u\) gennemløber intervallet \([0,1]\) vil punktet \((x,y)\) travere linjen med start \((2,0)\) og slut \((4,4)\).
u,v = symbols("u v")
r_L = Matrix([2,0]) + Matrix([2,4]) * u
r_L
dtuplot.plot_parametric(*r_L, (u,0,1), xlim=(0,5), ylim=(0,5)) # *-tegnet foran r_l er vigtig at huske når man plotter parametriske kurver
<spb.backends.matplotlib.matplotlib.MatplotlibBackend at 0x7f8c0d8f4b50>
Vi kan ofte gøre livet lidt nemmere, når vi skal parametrisere plane områder ved brug af linjestykker. Lad os kigge på to eksempler:
Eksempel#
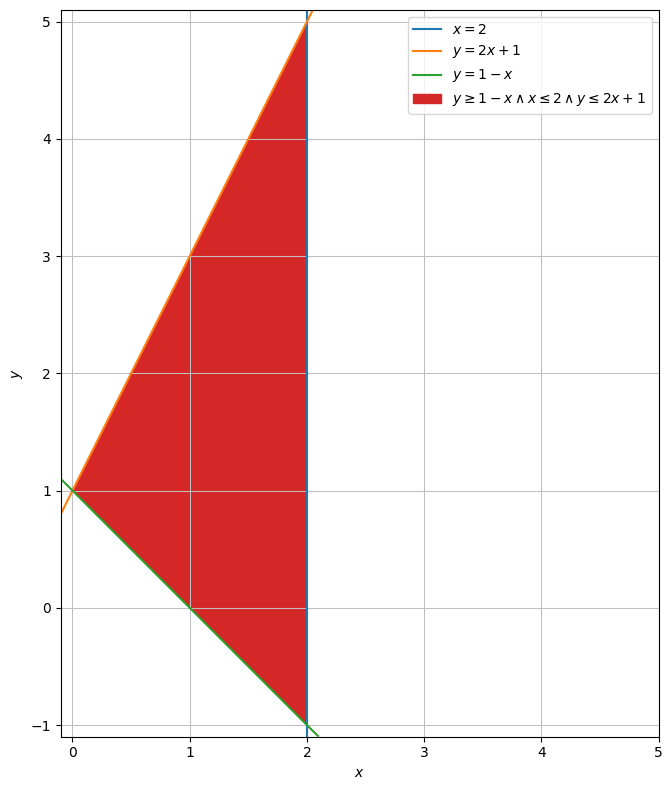
Vi skal parametrisere området i planen begrænset af linjerne:
\(y = 1-x\)
\(y = 2x+1\)
\(x=2\)
som beskrevet matematisk er
Lad os se hvordan det område ser ud:
x,y = symbols("x y")
område = dtuplot.plot_implicit(Eq(x,2),Eq(y,2*x+1),Eq(y,1-x),(x <= 2) & (y <= 2*x+1) & (y >= 1-x),(x,-0.1,5),(y,-1.1,5.1),aspect="equal",size=(8,8))
/builds/pgcs/pg1/venv/lib/python3.9/site-packages/spb/series.py:2214: UserWarning: The provided expression contains Boolean functions. In order to plot the expression, the algorithm automatically switched to an adaptive sampling.
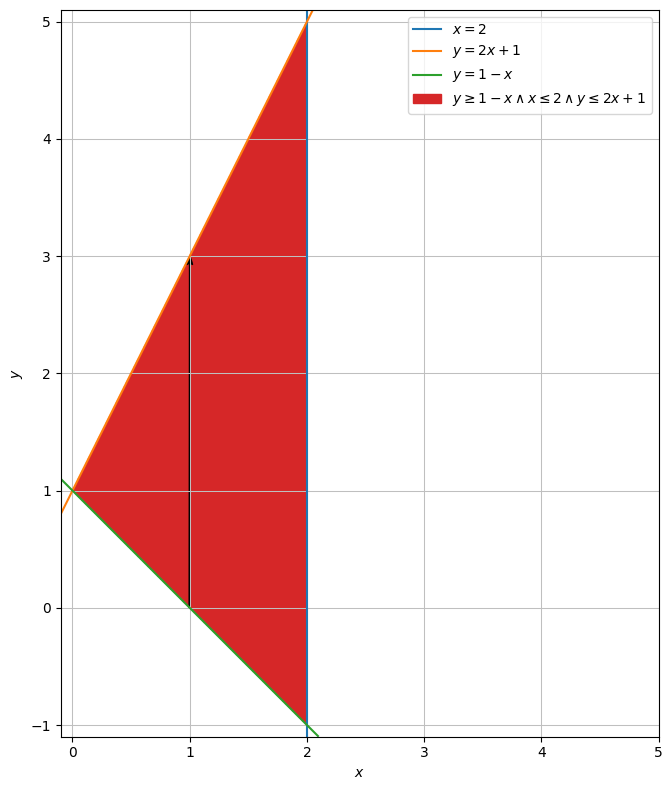
Vi vil gerne parametrisere hele området. Det betyder at alle linjer, der kan udspændes fra grafen \(y=-x + 1\) til grafen \(y=2x + 1\), skal beskrives.
Vi beskriver punkterne ved bunden af pilen generelt med \(A = (u,1-u)\)
Toppen beskriver vi generelt med \(B = (u,2u+1)\)
Derfor er retningsvektoren \(AB\) beskrevet ved
AB = dtuplot.quiver(Matrix([1,0]),Matrix([0,3]),show=False,rendering_kw = {"color" : "black"})
område.extend(AB)
område.show()
Vi kan så parametrisere et givet linjestykke mellem to punkter på toppen og bunden på følgende måde
Hvis vi vælger et \(u\), der løber i intervallet \([0,2]\), så vil vi gennemløbe alle linjerne fra venstre til højre, og på den måde dække hele trekanten.
Så hele område kan parametriseres som:
dtuplot.plot3d_parametric_surface(u,1-u+3*u*v,0,(u,0,2),(v,0,1),camera={"elev":90, "azim":-90})
## Man kan ikke plotte planer i 2d, så vi bruger "camera" argumentet til at kigge på plottet fra oven
/builds/pgcs/pg1/venv/lib/python3.9/site-packages/spb/backends/matplotlib/matplotlib.py:599: UserWarning: Attempting to set identical low and high zlims makes transformation singular; automatically expanding.

<spb.backends.matplotlib.matplotlib.MatplotlibBackend at 0x7f8bee97b4c0>
Områder begrænset af cirkler#
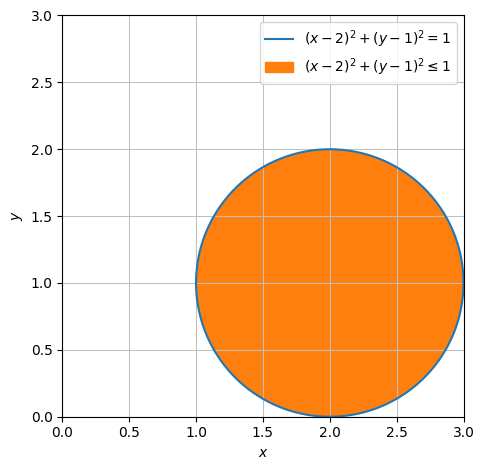
Vi vil nu parametrisere enhedscirkelskiven med centrum \((2,1)\). Fordi vi godt ved, hvordan en cirkel ser ud, så vi gå direkte efter af finde det linjestykke vi gerne vil parametrisere.
cirkel = dtuplot.plot_implicit(Eq((x-2) ** 2 + (y-1) ** 2,1),((x-2) ** 2 + (y-1) ** 2 <=1),(x,0,3),(y,0,3), aspect = 'equal',show=False)
AB = dtuplot.quiver(Matrix([2,1]),Matrix([cos(pi /4),sin(pi / 4)]),rendering_kw={"color":"black"}, show=False)
# cirkel.extend(AB)
(cirkel + AB).show()
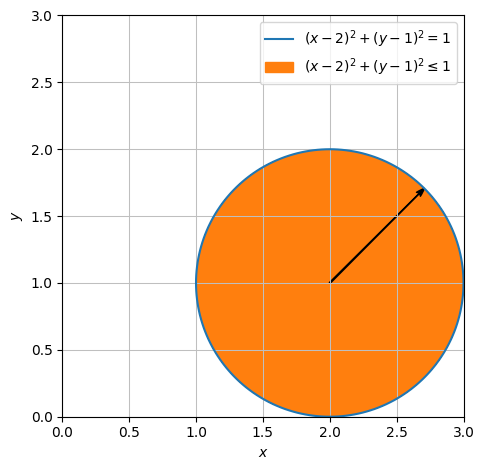
Vi vil nu parametrisere enhver linje, der går fra centrum til et punkt på cirkelskivens rand. Dette gøres på følgende måde. Vores \(A\) er nu \((2,1)\), vores \(B\) er \((2 + \cos(u), 1 + \sin(u))\), så vores retningsvektor \(AB\) er derfor \(\begin{bmatrix} \cos(u) \\ \sin(u) \end{bmatrix}\). Denne specifikke linje parametriseres derfor som:
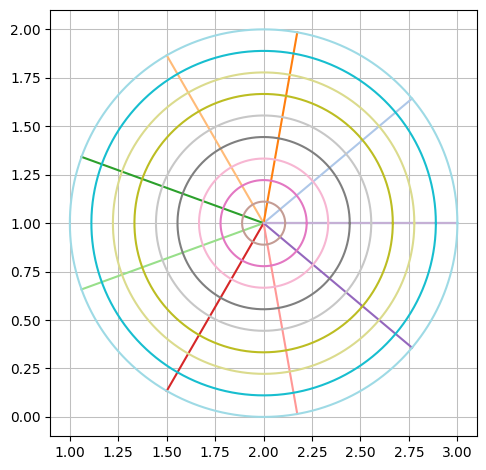
Hvis vi lader \(u\) gennemløbe intervallet \([0,2 \pi]\), så kan vi få alle linjerne mellem centrum og randen, og på den måde få hele cirklen med. Så fladen parametriseres:
rC = Matrix([2,1]) + v * Matrix([cos(u),sin(u)])
rC
dtuplot.plot_parametric_region(*rC, (u,0,2*pi), (v,0,1), aspect="equal")
<spb.backends.matplotlib.matplotlib.MatplotlibBackend at 0x7f8c10a74280>
For hver af disse områder i planen kan et planintegral for en given funktion udregnes.
Planintegralet#
Givet funktionen
f = lambda x,y: 2 * x * y
f(x,y)

ønsker vi finde planintegralet af \(f\) over området begrænset af vores cirkel, altså \(\int_C f(x,y)\; \mathrm{d}\pmb{x}\).
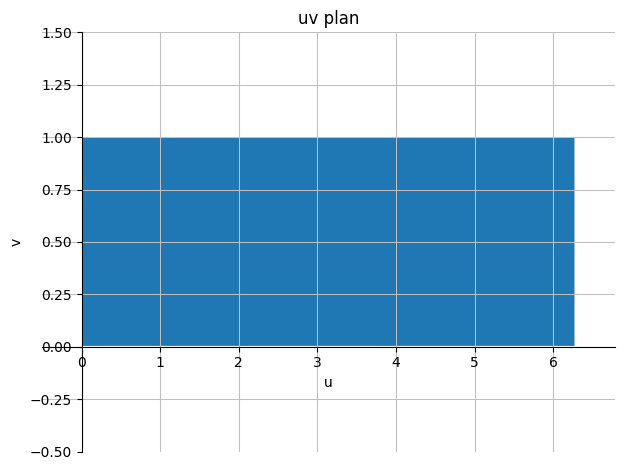
NB: Ved denne parameterfremstilling afbildes det akseparallelle kvadrat \([0, 2\pi] \times [0, 1]\) i \((u,v)\)-planen over i den cirkel vi integrerer over i \((x,y)\)-planen.
dtuplot.plot_implicit(((x < 2*pi) & (x > 0) & (y > 0) & (y < 1)), (x, -0.5, 2*pi + 0.5), (y, -0.5,1.5),
title="uv plan", xlabel="u", ylabel="v", axis_center='auto')
print("afbilledes i over")
cirkel.show()
afbilledes i over
Nu får vi brug for absolut-værdien af Jacobi-determinanten, som lokalt måler, hvor meget \((u,v)\)-parameterområdet deformeres, når det udsættes for afbildningen \(\boldsymbol r_C\). Og da der nu er flere variable og afledede, opstiller vi først Jacobimatricen:
JacobiM = Matrix.hstack(rC.diff(u), rC.diff(v))
JacobiM
Nu kan vi finde absolut-værdien af Jacobi-determinanten \(|\det(\boldsymbol J_{r_C})|\) ved
Jacobiant = abs(det(JacobiM)).simplify()
Jacobiant

Integralet af \(f\) over \(C\) er da ifølge Transformationsætningen givet ved:
integrate(f(*rC) * Jacobiant,(u,0,2*pi),(v,0,1))

Rumintegral: Vægten af en kugle i \(\mathbb{R}^3\)#
Lad
Altså beskriver \(\Omega\) en enheds kugle i \(\mathbb{R}^3\). Lad nu
beskrive en konstant “massetæthedsfunktion” (alle dele af kuglen antages altså at veje lige meget). Vi ønsker at bestemme vægten af kuglen beskrevet af \(\Omega\) altså skal vi bestemme
Dette kræver at vi først og fremmest skal bestemme en parametrisering for kuglen, og den tilhørende jacobi-determinant. Den nemmeste ville være at benytte sfæriske koordinater som beskrevet i bogen, men vi vil prøve at arbejde os frem til en parametrisering ud fra hvad vi ved om parametriseringen af a cirklen.
Parametrisering af en kugle#
u,v,w = symbols('u v w', real = True)
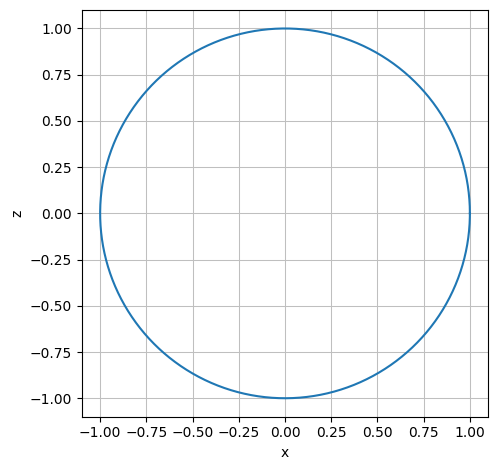
Vi vil anvende den tilgang at en kugle kan beskrives som en cirkel i xz-planen roteret 180 grader om z-aksen. Cirklen af parametriseret således:
r_circle = Matrix([cos(u), 0, sin(u)])
dtuplot.plot_parametric(r_circle[0], r_circle[2], (u,0,2*pi), use_cm=False,aspect="equal", xlabel = 'x', ylabel = 'z')
<spb.backends.matplotlib.matplotlib.MatplotlibBackend at 0x7f8beda9b3a0>
Herefter kan cirklen roteres om z-aksen vha rotationsmatricen
Dette vil altså give en sfære med radius 1.
Rz = Matrix([[cos(v), -sin(v), 0], [sin(v), cos(v), 0], [0, 0, 1]])
r_sphere = simplify(Rz * r_circle)
r_sphere
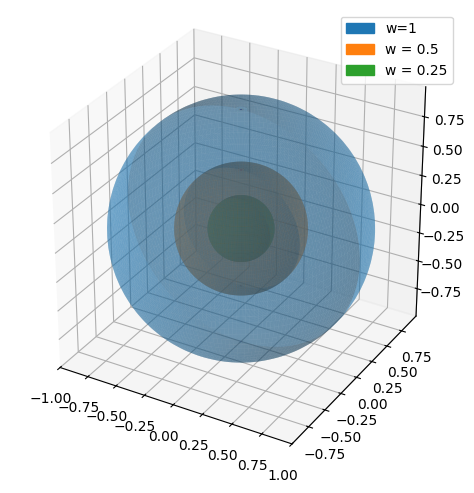
Tilsidst kan vi opnå en solid kugle ved at indføre parameteren \(w \in [0,1]\), som sørger for at vi kan ramme alle radier mellem 0 og 1. Altså er den parameterfremstillingen for kuglen:
r_ball = r_sphere * w
r_ball
Dette kan visualiseres ved at kigge på \(\boldsymbol{r}_{ball}\) med forskellige værdier for \(w\)
big_ball = dtuplot.plot3d_parametric_surface(*r_ball.subs(w,1), (u, 0, 2*pi), (v, 0, pi), aspect = 'equal', label = 'w=1', rendering_kw = {'alpha': 0.4,}, show = false)
half_ball = dtuplot.plot3d_parametric_surface(*r_ball.subs(w,0.5), (u, 0, 2*pi), (v, 0, pi),label ='w = 0.5', rendering_kw = {'alpha': 0.5}, show = False)
quarter_ball = dtuplot.plot3d_parametric_surface(*r_ball.subs(w,0.25), (u, 0, 2*pi), (v, 0, pi),label ='w = 0.25', show = False)
(big_ball + half_ball + quarter_ball).show()
Jacobi-determinanten og tæthedsfunktion#
Jacobi-determinanten \(\det(\boldsymbol{J}_{r_{ball}})\) findes ved
Dette kan let gøres med dtumathtools, hvor vi medtager absolut-værdien:
J_ball = r_ball.jacobian([u,v,w])
J_ball
Jacobiant = abs(det(J_ball)).simplify()
Jacobiant
Tæthedsfunktionen er i dette tilfælde 1-funktionen og derfor ikke nødvendig at medregne, men lad os definere den for formalitetens skyld
f = lambda x,y,z: 1
Bestemmelse af integralet#
Nu kan vi bestemme vægten af kuglen ved
Først definerer og simplificerer vi integranden
integrand = (f(*r_ball) * Jacobiant).simplify()
integrand
M = integrate(integrand, (u, 0, 2*pi), (v, 0, pi), (w, 0, 1))
M

Bemærk at \(M\) er lig med volumet af en kugle med radius 1, hvilket giver god mening da alle punkter er blevet tildelt vægten \(1\).
En anden tæthedsfunktion#
Lad nu
beskrive en ny tæthedsfunktion.
Lad os bestemme
f1 = lambda x,y,z: 2*sqrt(x**2 + y**2 + z**2)
integrand = (f1(*r_ball) * Jacobiant).simplify()
integrand

M1 = integrate(integrand, (u, 0, 2*pi), (v, 0, pi), (w, 0, 1))
M1
